Entre os dias 18 e 22 de outubro a cidade de São Carlos, no
interior paulista, sediará três grandes competições de robótica, além de uma
mostra sobre o tema. Todos os eventos serão gratuitos e abertos ao
público.
No dia 18 de outubro, aproximadamente 170 equipes se apresentarão para duas
competições: a Latin American Robotics Competition (LARC) e Competição
Brasileira de Robótica (CBR). No dia 19 começa a jornada de desafios dos robôs
trazidos por esses 20.000
competidores. A disputa prossegue até o dia 22, quando acontecem as premiações.
Além das competições, São Carlos também sediará, durante o
mesmo período, a 4ª Mostra Nacional de Robótica (MNR), a maior mostra de
trabalhos em robótica do país, que estimula trabalhos entre a robótica e
diversas outras áreas do conhecimento, como artes, humanidades, ensino,
ciências e inovação, além das áreas tradicionais, como elétrica, mecânica e
computação.
A fabricante japonesa muRata anunciou robôs que podem ajudar
no controle do trânsito e até evitar,acidentes de carro. Chamadas de
cheerleaders, os modelos, que mais parecem bonecas, têm sensores giroscópios,
infravermelhos e microfones ultrassônicos que detectam objetos nos arredores. A
robô pode parar carros e redirecionar o tráfego de avenidas em obras ao se
comunicar com os computadores de bordo dos automóveis.
A Cheerleader é sustentada por uma bola metálica, tecnologia
de locomoção originalmente desenvolvida por universidades como a de Tóquio e Carnegie
Mellon. Assim, ela se movimenta ao ser atraída por um imã e fica estática de acordo
com os sensores de movimento da máquina. Além disso, a boneca
apresenta um microfone na cabeça e luzes em partes do corpo, o que a torna
visível em locais escuros.
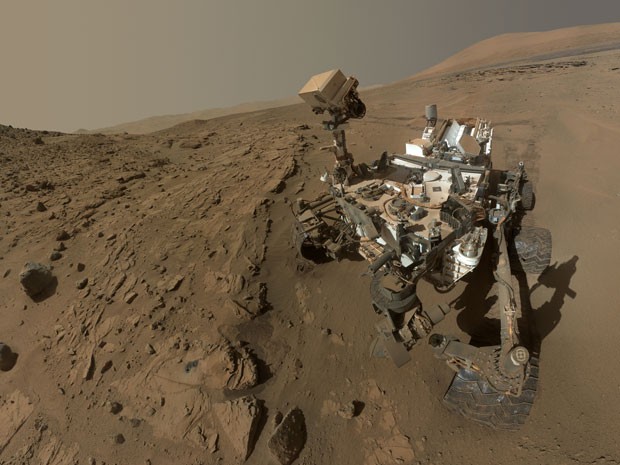
O robô
Curiosity da Nasa chegou à base do Monte Sharp e deve começar a
explorá-lo em breve, informou nesta quinta-feira (11) a agência espacial
americana.
A Nasa
defendeu também o trabalho do veículo robótico, depois de um painel de revisão
ter criticado a missão em julho, alegando que faltava foco à missão.
O explorador
marciano, que custou à Nasa US$ 2,5 bilhões, pousou no planeta vermelho em
agosto de 2012 com o objetivo de explorar o terreno e buscar vestígios que
permitam averiguar se houve vida em Marte.
"Por
fim, chegamos à fronteira distante que buscamos por tanto tempo", disse
John Grotzinger, cientista do projeto Curiosity do Instituto Tecnológico da
Califórnia.
O veículo
está agora na base do Monte Sharp (também conhecido como Aeolis Mons) e vai
começar a subi-lo nos próximos dias para perfurar a rocha cinza esverdeada nas
próximas duas semanas, disse Grotzinger.
O robô
seguirá por uma rota um pouco mais direta do que havia sido planejado
originalmente, depois que quatro de suas seis rodas foram danificadas no ano passado
pelas rochas da superfície marciana.
(A) Através de desenhos, fotos ou vídeos ensine como
construir um telefone de Latinha vitorioso.
(B) Cite 5 conceitos físicos presentes no experimento e
explique a relação dos conceitos dentro do experimento.
1- Ondas mecânicas : O próprio som é um exemplo de um uma onda
mecânica de pressão que se propaga no ar ou nos sólidos. O som se propaga através do barbante por meio de vibrações, da pessoa que está falando até chegar em quem está ouvindo.
2- Frequência: A frequência é uma grandeza física ondulatória que indica o
número de ocorrências de um evento (ciclos, voltas, oscilações, etc) em um
determinado intervalo de tempo. Há a quantidade de ondas transmitidas no barbante por meio de ondulações.
3- Intensidade: A intensidade de uma fonte ou onda mede a variação do
fluxo de energia no tempo, basicamente quanto maior a intensidade maior o fluxo
de energia pelo espaço, ou seja quanto maior a intensidade da voz maior será a amplitude do som do outro lado do telefone.
4- Refração: Refração é a mudança na direção de uma onda ao atravessar a
fronteira entre dois meios com diferentes índices de refração, no caso do
telefone ocorre através do barbante.
Fonte: http://pt.wikipedia.org/wiki/Refra%C3%A7%C3%A3o
5- Ressonância: Oscilação do barbante conforme a fala no telefone.
(C) Indique a função de cada elemento do grupo (de maneira
detalhada) no projeto do telefone de Latinha.
Bruna: Testes
Carolina: Levou os copos plásticos e os de requeijão
Francine: Compra dos fios, montagem do telefone, testes, postagens sobre o trabalho no blog e relatório
Gilian: Montagem do telefone, testes e relatório
Julia: Levou a lata de tomate e relatório
Marina: Testes
Rhilary: Levou a lata de nescau e Testes
(D) Responda características físicas do experimento:
Para a boa execução do telefone há a combinação dos materiais, que foram escolhidos para ouvir e para falar de acordo com sua abertura e as pessoas, onde uma consegue reconhecer o timbre de voz da outra com facilidade passando assim as palavras rapidamente. Nosso telefone de latinha até o momento na competição teve uma ótima performance, sempre ficamos entre os primeiros.
(F) Cite problemas e soluções durante o trabalho
Durante a construção só tivemos problemas em relação ao fio que foi trocado de acordo com os testes e fomos observando a quantidade de palavras que eram passadas e assim escolhemos o melhor modelo. Os ajustes foram feitos no momento dos testes quando testamos todos os integrantes para falar e ouvir até achar uma "dupla" que desse mais certo.
(G) Conclua o Trabalho.
O grupo conseguiu construir vários telefones e entre eles um se destacou mais, este foi o utilizado pelo grupo durante as competições, visto que teve boa performance colocando o grupo no topo de lista dos classificados para a final da competição até o momento. Com o trabalho foi possível perceber como uma construção que é conhecida com brincadeira de criança pode nos mostrar a propagação do som por meio de ondas sonoras.
A ligação da música com a ciência remonta
à Escola Pitagórica, no século VI a.C. O ponto de partida era a relação entre
os comprimentos das cordas de uma lira e as notas musicais e a percepção que
cordas mais curtas emitiam sons mais agudos .A partir daí foi desenvolvida uma
teoria completa, relacionando comprimentos de cordas, escalas, intervalos,
notas, números inteiros e frações. Em particular, a associação de uma fração a
um dado intervalo musical mostrou-se um dos princípios mais fecundos da
acústica e em cima dele montou-se praticamente toda a teoria da música
ocidental
A relação entre a Física e a Música
começou a aparecer de maneira mais sistemática junto com a criação da teoria
ondulatória. Há a percepção do som a partir de propriedades físicas, que nos
permitem ouvir o som sem, necessariamente, estar na frente da fonte sonora.
Como toda onda, o som sofre reflexão, é absorvido pelo meio em que se propaga,
atenuado pelo atrito com as moléculas do meio e transmitido de um meio a outro.
No telefone de latinha: Quando se
aplica tensão ao fio e falamos para uma das latas do telefone, o som vibra pelo
fio esticado até à outra lata. A pessoa do outro lado do telefone ouve a
mensagem após os seus ouvidos captarem as vibrações de som e as enviarem para o
cérebro para serem processadas. As vibrações são causadas por ondas sonoras
que são ondas longitudinais que consistem numa série de compressões,
seguidas de rarefações, e que se propagam através de meios como o ar, a água ou
os sólidos.
O telefone é
um dos dispositivos de telecomunicações desenhados para
transmitir sons por meio de sinais elétricos nas vias telefônicas.
É definido
como um aparelho eletroacústico que permite a transformação, no ponto
transmissor, de energia acústica em energia elétrica e,
no ponto receptor, há a transformação da energia elétrica em acústica,
permitindo desta forma a troca de informações (falada e ouvida) entre dois ou
mais assinantes. Para haver êxito nessa comunicação, os aparelhos necessitam
estar ligados a vários equipamentos, que formam uma central telefônica.
Alexander
Graham Bell (foto ao lado) no início de 1876, registrou no Escritório de Patentes dos Estados
Unidos a invenção pela qual entraria para a história da humanidade.
O registro
garantia a Bell a patente de um aparelho eletromagnético que permitia a
comunicação simultânea entre dois pontos a uma longa distância entre si. Na
mesma época, porém, veio a primeira briga judicial de Bell: Elisha Gray,
engenheiro elétrico estadunidense, também reivindicava a invenção do telefone.
No início da
década de 1870, Gray descobriu por acaso uma função aprimorada para o
telégrafo, que permitia a transmissão de sinais sonoros simultâneos pelo mesmo
cabo. Seu projeto empacou, pois ele não descobriu um método de separar os
sinais enviados para que pudessem ser interpretados na estação receptora. A
demora em registrar seu trabalho levou Gray a ficar para trás.
O primeiro protótipo do telefone criado por Meucci era um
tubo para conduzir o som entre palco e sala de controle do
Teatro della Pergola, em sua cidade natal. Em 1854, o inventor
italiano aprimorou sua criação e desenvolveu um sistema que permitia a sua
mulher enferma se comunicar, de casa, com ele, que trabalhava em um
edifício vizinho. Criava-se aí o primeiro sistema telefônico do mundo, chamado
por ele de “teletrofono”.
Na década de 1860, o imigrante italiano, que já era pobre,
caiu de cama após ficar gravemente ferido durante a explosão do barco
em que viajava. Com as finanças cada vez mais escassas, sua esposa se viu
obrigada a vender algumas patentes do marido. Nessa época, ela teria negociado
inclusive um protótipo do telefone.
Recuperado, Meucci retomou os trabalhos de sua
principal invenção, mas não tinha recursos para patenteá-la de forma permanente.
Em 28 de dezembro 1871, ele entrou com um processo para registro da patente do
“telettrofono”. Como não tinha dinheiro suficiente para registrar
permanentemente sua invenção, fez o registro temporário enquanto procurava
investidores e voltou a realizar demonstrações de sua invenção para atrair
patrocínio.
Reconhecimento tardio: Em 11 de junho de 2002, o
Congresso dos Estados Unidos reconheceu, por meio da resolução 269, as
contribuições de Antonio Meucci para a invenção do telefone, ou seja, atestando
a o italiano como o verdadeiro inventor do aparelho. Apesar disso, a patente de
Bell não foi anulada ou modificada.
Muitos métodos e instrumentos foram inventados,
buscando reduzir o tempo de transmissão das mensagens e também dar as mesmas a
segurança do recebimento, sem haver quebra do sigilo. Em 1667 o físico inglês
Robert Hooke sugeriu o emprego do fio esticado para transmitir o som.
Muitas pessoas na sua infância terão brincado de telefonar, usando
um fio de barbante preso a latas de massa de tomate nas duas extremidades. Foi
esse o princípio de transmissão sugerido por Hooke.
Quando se aplica tensão ao fio e falamos para uma das latas
do telefone, o som vibra pelo fio esticado até à outra lata. A pessoa do outro
lado do telefone ouve a mensagem após os seus ouvidos captarem as vibrações de
som e as enviarem para o cérebro para serem processadas. As vibrações são causadas por ondas sonoras que são ondas longitudinais que consistem numa
série de compressões, seguidas de rarefações, e que se propagam através de meios
como o ar, a água ou os sólidos. As Ondas Sonoras propagam-se muito melhor, e
mais rapidamente, nos materiais sólidos do que no ar.
Com o avanço cada vez maior da tecnologia, nem as
brincadeiras mais antigas continuam as mesmas. Antes da invenção do
telefone e até mesmo depois dela era comum crianças brincarem com telefones de
lata feitos por elas mesmas, normalmente com um fio de barbante e duas latas de
metal.
Uma empresa chamada Monkey Wrench Design resolveu dar
uma incrementada na antiga ideia e torná-la mais tecnológica. Nessa nova versão
desenvolvida por eles, as latas poderão ser conectadas em tablets, smartphones e
computadores através de uma entrada USB ou pelos conectores dos fones
de ouvido, além da possibilidade de conversar por meio de vídeo conferência.
Faltam poucos dias para um acontecimento que pode ser um
grande marco da ciência, especialmente da ciência do Brasil.
Se tudo der certo, um jovem com paralisia nas pernas vai
ficar em pé, andar e chutar uma bola, na abertura da Copa do Mundo! À frente
desse projeto internacional, um brasileiro: o neurocientista Miguel Nicolelis.
As salas onde se faz ciência de ponta ficam na capital
paulista, mas o ambiente é internacional. Um chute dado por uma pessoa com
paralisia, visto pelo mundo todo. Será a realização de um sonho de um homem: o
neurocientista brasileiro, e palmeirense fanático, Miguel Nicolelis. Há
dois anos, o Fantástico acompanha, de muito perto, esse trabalho. Em 2012,
mostramos o pontapé inicial desse projeto ambicioso, no laboratório de
Nicolelis, na universidade Duke, nos Estados Unidos.
O primeiro modelo de uma perna robótica. “Aqui em cima seria
a articulação de um fêmur na bacia e aqui seria um joelho”, explicou Nicolelis,
na época. No ano passado, também em Duke, acompanhamos o avanço das
pesquisas. Um protótipo com duas pernas e pés já sendo usado por um macaco.
“Que está aprendendo a vestir o exoesqueleto”, disse o neurocientista.
Agora, no Brasil, em colaboração com a Associação de
Assistência à Criança Deficiente, é a reta final. “A gente fala em horas,
minutos e segundos. Todo mundo está aqui vivendo essa expectativa”, declara
Nicolelis.
Para entender a pesquisa do professor Nicolelis, precisamos
antes aprender duas novas expressões. A primeira é 'exoesqueleto'. Ou seja, um
esqueleto que fica por fora do corpo. Ele também é chamado, simplesmente, de
robô. A outra expressão é: 'interface cérebro-máquina', quer dizer uma máquina
que é comandada pelo cérebro de uma pessoa.
Funciona assim: com seus pensamentos, o paciente controla
quando o robô deve começar a andar. O robô dá os passos. O paciente decide
quando chutar, e a máquina chuta. E a pessoa, que com os pensamentos, manda
parar o movimento.
Oito jovens adultos brasileiros, que perderam os movimentos
e a sensibilidade nas pernas, foram selecionados para a fase final da pesquisa.
Mas só um deles vai dar o tão esperado chute, na abertura da Copa, dia 12 de
junho. “A pessoa tem também que querer, estar à vontade, se sentir bem, ter
prazer, estar feliz em fazer isso. Todos estão preparados”, afirma Nicolelis.
Para ser o escolhido, é preciso treinar. E muito. “Essa é
uma máquina suíça de reabilitação, que nós trouxemos para o Brasil. Os nossos
pesquisadores adaptaram essa máquina para poder ser um simulador do que o
exoesqueleto é capaz de fazer”, explica o professor.
Para os pacientes, só entrar na máquina já foi uma emoção
imensa. “Teve um paciente que falou para mim que fazia anos que ele não tinha a
sensação de ficar na vertical. O que é uma coisa para nós, que a gente assume,
que é trivial, né? Mas para pacientes com lesão completa da medula espinhal é
uma grande conquista, né”, conta.
O termo robô
tem origem na palavra checa robota, que significa "trabalho
forçado",é um dispositivo, ou grupo de dispositivos, eletromecânicos ou
biomecânicos capazes de realizar trabalhos de maneira autônoma ou
pré-programada. Os robôs são utilizados na realização de tarefas em local mal iluminado, ou na realização de tarefas sujas ou perigosas para os seres
humanos.
Os industriais, por exemplo, usados em linhas de produção é onde são encontrados as
formas mais comuns de robôs. Outras aplicações são: tratamento de lixo tóxico,
exploração subaquática e espacial, cirurgias, mineração, busca e resgate,
e localização de minas terrestres. Os robôs também aparecem nas áreas do
entretenimento e tarefas caseiras.
Robótica é um ramo
educacional e tecnológico que engloba computadores, robôs e computação,
que trata de sistemas compostos por partes mecânicas automáticas e controladas
por circuitos integrados, tornando sistemas mecânicos motorizados,
controlados manualmente ou automaticamente por circuitos eléctricos. E
dado o conceito de robot no inicio da história quando mitos faziam referência a
mecanismos que “ganhavam” vida.
Dando inicio na civilização
grega, os primeiros modelos de robots encontrados eram figuras com aparência
humana e/ou animal, que usavam sistemas de pesos e bombas pneumáticas, sem
nenhuma necessidade prática ou econômica.
Mais tarde, cientistas árabes
acrescentaram um importante e novo conceito à ideia tradicional de robots,
concentrando as suas pesquisas no objetivo de atribuir funções aos robôs e a
sua possível utilização prática marcou o inicio de uma nova era.
Em 1495, Leonardo DaVinci
abriu caminho a uma maior aproximação ao complexo mundo dos robots ao
desenvolver uma extensiva investigação no domínio da anatomia humana que
permitiu o alargamento de conhecimentos para a criação de articulações
mecânicas. Como resultado deste estudo, surgiram diversos exemplares de bonecos
que moviam as mãos, os olhos e as pernas, e que conseguiam realizar ações
simples como escrever ou tocar alguns instrumentos.
O desenvolvimento inicial dos robots baseou-se no esforço de automatizar as
operações industriais, o qual começou no século XVIII, na indústria têxtil, com
o aparecimento dos primeiros teares mecânicos. Com o contínuo progresso da
revolução industrial, as fábricas procuraram equipar-se com máquinas capazes de
realizar e reproduzir, automaticamente, determinadas tarefas. A partir daí começaram aparecer os primeiros robôs que eram ativos, como em
1738, foi criado o primeiro robot funcional por Jacques de Vaucanson, que fez
um andróide que tocava flauta, assim como um pato mecânico que comia e
defecava.Em 1898, foi exibido, no Madison Square Garden, o barco tele operado
inventado por Nikola Tesla, e que segundo as definições modernas, muitos
consideram ser o primeiro robot.
Nos anos 30, a então denominada Westinghouse Electric Corporation fez um
robothumanóide conhecido como Elektro e que foi exibido no World's Fair de 1939
e 1940.
Isaac Asimov e Joe Engleberger
Em 1942, foi enunciado pela primeira vez o termo “robótica” pelo cientista e
escritor Isaac Asimov, numa pequena história intitulada "Runaround".
Asimov também publicou uma compilação de pequenas histórias, em 1950,
intitulada "I Robot" em que propôs a existência de três leis
aplicáveis à robótica, às quais acrescentou, mais tarde, a lei zero. As leis
propostas são:
1ª Lei: Um robot não pode ferir um ser humano ou, por omissão, permitir que um
ser humano sofra algum mal. 2ª Lei: Um robot deve obedecer as ordens que lhe sejam dadas por seres humanos,
excepto nos casos em que tais ordens contrariem a Primeira Lei. 3ª Lei: Um robot deve proteger sua própria existência desde que tal proteção
não entre em conflito com a Primeira e Segunda Leis.
Lei Zero: Um robot não pode fazer mal à humanidade e nem, por inação, permitir
que ela sofra algum mal.
Em 1948, Grey Walter, da Universidade de Bristol, criou o primeiro robot
autónomo electrónico.
Unimates
O primeiro robot industrial foi o Unimates, desenvolvido por George Devol e Joe
Engleberger, no final da década de 50, início da década de 60 (1961).
Engleberger, por sua vez, pela construção do primeiro robot comercial foi
apelidado de "Pai da robótica". No final da década de 60 (1970), foi
desenvolvido um modelo experimental chamado Shakey, desenhado para pesquisas em
Standford.
Atualmente, robots como o Shakey continuam a ser utilizados, particularmente
com intuitos de pesquisa, mas, no futuro, estes computadores podem vir a ser
utilizados como veículos de reconversão ambiental.
Hoje é dia de lembrar de um grande físico, Albert Einstein nasceu em 14 de Março de 1879. Foi um físico teórico alemão, que desenvolveu a teoria da relatividade geral, um dos dois pilares da física moderna.
Einstein publicou mais de 300 trabalhos científicos, juntamento com mais de 150 obras não cientificas. Suas grandes conquistas intelectuais e originalidade fizeram a palavra "Einstein" sinônimo de gênio. 100 físicos renomados elegeram-no, em 1999, o mais memorável físico de todos os tempos.
Eletroscópio tipo pêndulo e tipo folhas: Francine e Gilian: fizeram ambas as construções Bruna, Carolina, Marina e Rhilary: fizeram a construção do eletroscópio tipo pêndulo *A aluna Julia não teve participação pois entrou na escola após a competição
Cabo de guerra: Não fizemos testes antes da competição, compramos a bexiga e fizemos na hora.
Relatórios: Todas integrantes do grupo farão as questões e será "montado" pela aluna Francine.
Blog: Francine.
Questão de fim de semana: Todas as integrantes do grupo farão.
Bruna Luana da Silva
Carolina Fernanda Diniz da Silva
Francine Silva Rodrigues Ferreira (L)
Gilian Maria Rossener Barros
Julia Rodrigues Moreira Marina Shu Möeller de Carvalho
Rhilary de Moura Ribeiro
 No dia 18 de outubro, aproximadamente 170 equipes se apresentarão para duas
competições: a Latin American Robotics Competition (LARC) e Competição
Brasileira de Robótica (CBR). No dia 19 começa a jornada de desafios dos robôs
trazidos por esses 20.000
competidores. A disputa prossegue até o dia 22, quando acontecem as premiações.
No dia 18 de outubro, aproximadamente 170 equipes se apresentarão para duas
competições: a Latin American Robotics Competition (LARC) e Competição
Brasileira de Robótica (CBR). No dia 19 começa a jornada de desafios dos robôs
trazidos por esses 20.000
competidores. A disputa prossegue até o dia 22, quando acontecem as premiações.







.jpg)
.jpg)





